About me
I'm a PhD candidate in Perceptual Robotics 🤖, I focus my research on high-level controls for autonomous vehicles, both terrestrials 🏎️ and aerials 🛸, but I also enjoy Embedded programming and low-level controls!
Something more about me...
Pending publications
-
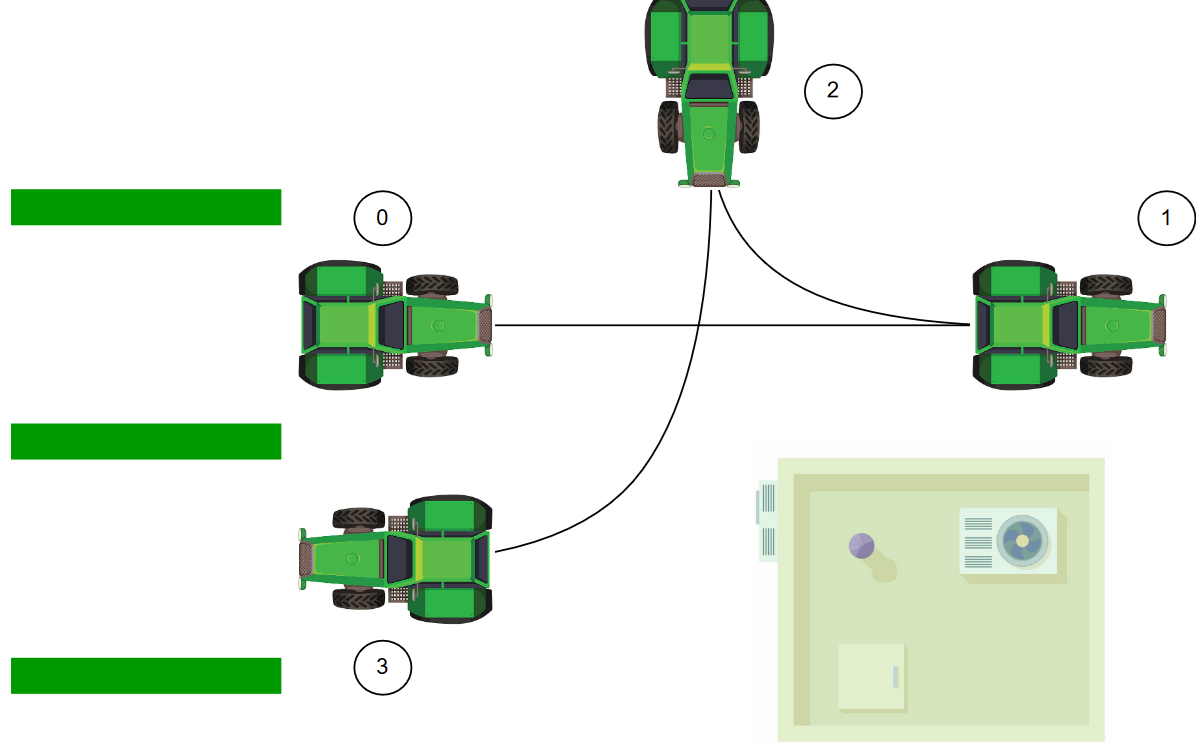
Coverage planning for agricolture
A novel approach that combines coverage and trajectory planning in agricolture, with focus on time optimality.
Publications
-
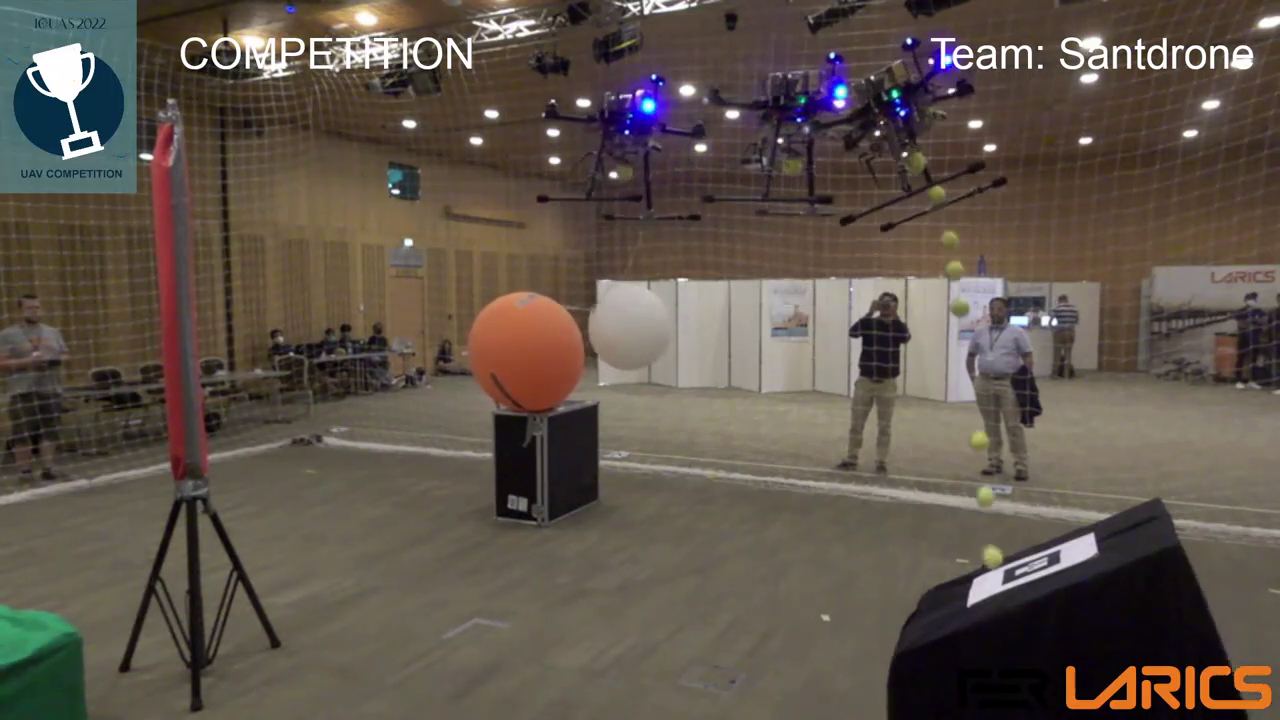
Towards Autonomous Firefighting UAVs
Online planner for obstacle avoidance and payload delivery for unknown scenarios, with time optimality.
-
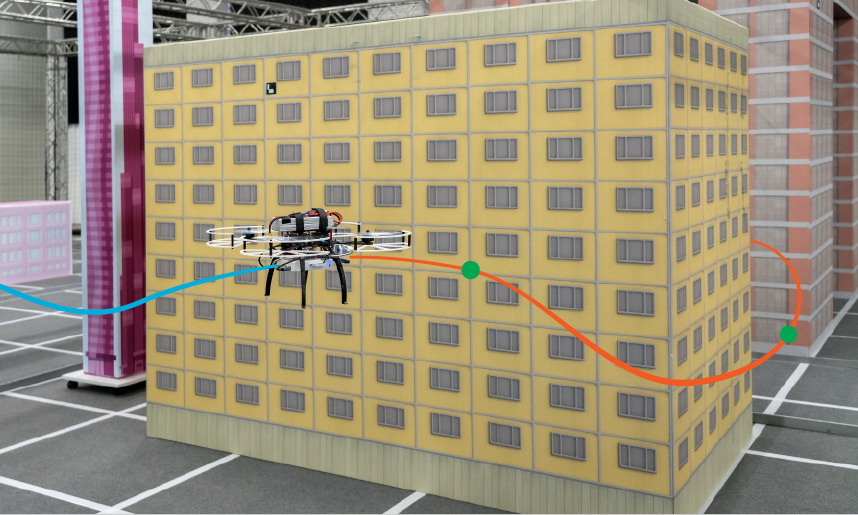
Autonomous UAV Missions in Partially Unknown GNSS-Denied Environments
A framework for complex mission tasks for multirotors, covering path planning, obstacle avoidance and visual task handling.
-

KerubLess - Design of a Driverless Formula SAE Vehicle
Autonomous modules and hardware choices that compose the Driverless stack of Pisa's Racing Team vehicle.
-
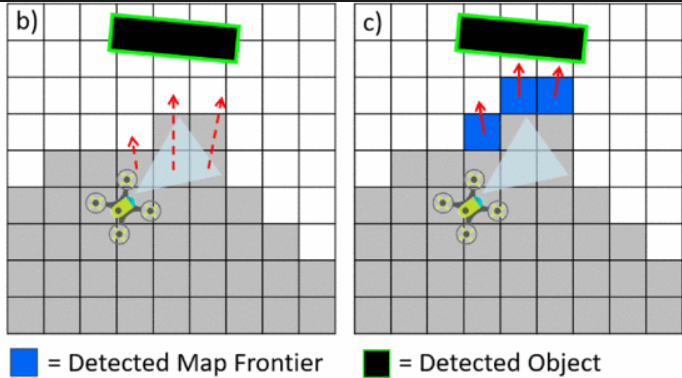
An Efficient Object-Oriented Exploration Algorithm for Unmanned Aerial Vehicles
A novel planning method that explore unknown environments, with the focus on element of interest localization.